Corrections – Isométrie du plan – Tle
Exercice 1
1) On a : OA = OB et (\widehat{\overrightarrow{OA}, \overrightarrow{OB}}) \equiv \dfrac{\pi}{2} [2\pi] donc r(A) = B
On a : OB = OC et (\widehat{\overrightarrow{OB}, \overrightarrow{OC}}) \equiv \dfrac{\pi}{2} [2\pi] donc r(B) = C
On a : OC = OD et (\widehat{\overrightarrow{OC}, \overrightarrow{OD}}) \equiv \dfrac{\pi}{2} [2\pi] donc r(C) = D
2.a) On a : \overrightarrow{AI} = \dfrac{1}{4} \overrightarrow{AB} \Leftrightarrow 4\overrightarrow{AI} = \overrightarrow{AI} + \overrightarrow{IB} = \overrightarrow{0} \Leftrightarrow I est le barycentre du système { (A,3) ; (B,1) } donc I est le barycentre de \lbrace (B,3) ; (C,1) \rbrace car r(A) = B et r(B) = C (la rotation conserve les barycentres).
D’autre part on a :
\overrightarrow{BJ} = \dfrac{1}{4}\overrightarrow{BC} \Leftrightarrow 4\overrightarrow{BJ} = \overrightarrow{BJ} + \overrightarrow{JC} \Leftrightarrow 3\overrightarrow{JB} + \overrightarrow{JC} = \overrightarrow{0} \Leftrightarrow J est le barycentre du système \lbrace (B,3) ; (C,1) \rbrace
Conclusion : r(I) = J (car un système de deux points admet un seul barycentre).
b) On a : r(I) = J et r(0) = 0 donc OI = OJ et (\widehat{\overrightarrow{OI}, \overrightarrow{OJ}}) \equiv \dfrac{\pi}{2} \ [2\pi] donc OIJ est un triangle isocèle rectangle en O.
Exercice 2
1.a) On a : ADBC est un losange.
r(D) = r_2 \circ r_1(D)
On a : r_1(D) = B car AD = AB et \widehat{(\overrightarrow{AD},\overrightarrow{AB})} \equiv \dfrac{\pi}{3} [2\pi].
r_2(B) = B \text{ donc } r(D) = r_2 \circ r_1(D) = r_2(B) = B.
r(B) = r_2 \circ r_1(B) = r_2 (r_1(B))
Or r_1(B) = C car AB = AC et \widehat{(\overrightarrow{AB},\overrightarrow{AC})} = \dfrac{\pi}{3} [2\pi].
Donc r(B) = r_2(C) = A car BC = BA et \widehat{(\overrightarrow{AD}, \overrightarrow{AB})} = \dfrac{\pi}{3} [2\pi].
Donc r(B) = A.
b) r est la composée de deux déplacements donc r est un déplacement. Soit (\theta) une mesure de son angle :
\theta = \dfrac{\pi}{3} + \dfrac{2\pi}{3} [2\pi] \equiv \pi [2\pi] donc r est une symétrie centrale.
Comme r(D) = B alors le centre de r est B ^* D = \Omega.
Conclusion : r = S_\Omega .
c) On a : r(M) = r_2 \circ r_1 (M) = r_2(N) = M’ d’où \Omega = M ^* M’.
2.a) On a : r_1(A) = A et r_1(M) = N donc AM = AN et \widehat{(\overrightarrow{AM},\overrightarrow{AN})} \equiv \dfrac{\pi}{3} [2\pi].
Donc AMN est un triangle équilatéral.
b) \widehat{(\overrightarrow{ M\Omega}, \overrightarrow{ M A})} \equiv \widehat{(\overrightarrow{ M \Omega}, \overrightarrow{ M’ \Omega})} + \widehat{(\overrightarrow{ M’ \Omega}, \overrightarrow{ MA})} [\pi].
Or \widehat{(\overrightarrow{ M \Omega}, \overrightarrow{ M’ \Omega})} \equiv \pi [2\pi] car \Omega = M ^* M’ donc \widehat{(\overrightarrow{ M \Omega} , \overrightarrow{ M’ \Omega})} \equiv 0 [\pi].
D’où \widehat{(\overrightarrow{ M \Omega } , \overrightarrow{ MA})} \equiv \widehat{( \overrightarrow{ M’ \Omega } , \overrightarrow{ MA})} [\pi] \equiv \widehat{(\overrightarrow{ MN}, \overrightarrow{ MA})} [\pi] car \Omega, M’, N, M sont alignés.
D’où \widehat{(\overrightarrow{ M \Omega} , \overrightarrow{ MA})} \equiv \dfrac{\pi}{3} [\pi]. Ainsi AMN est un triangle équilatéral de sens direct.
Exercice 3
1.a) T(A) = R_B \circ R_A^{-1}(A) = R_B(A) = C \Rightarrow R\left(B,\dfrac{\pi}{2}\right)(A) = C
b) T est la composée de deux déplacements donc T est un déplacement.
Soit \alpha une mesure de son angle.
On a : \alpha \equiv \dfrac{\pi}{2} + \left(-\dfrac{\pi}{2}\right) [2\pi] \equiv 0 [2\pi]
Donc T est une translation qui transforme A en C, donc T = t_{\overrightarrow{AC}}.
c) On a : R_A(M) = M_1 donc R_A^{-1}(M_1) = M. D’où : T(M_1) = R_B(R_A^{-1}(M_1)) = R_B(M) = M_2 et \overrightarrow{M_1M_2} = \overrightarrow{AC}. Par suite M_1M_2CA est un parallélogramme.
2.a) On a M_2 = R_B(M).
Lorsque M décrit le cercle \Gamma de diamètre [AB], alors M_2 décrit le cercle \Gamma_2, image de \Gamma par R_B. \Gamma_2 est le cercle de diamètre [A’B’] où A’ = R_B(A) et B’ = R_B(B).
Or R_B(A) = C et R_B(B) = B.
Conclusion : \Gamma_2 est le cercle de diamètre [BC].
b) Dans le triangle ABC on a : \omega_1 = A ^* B et \omega_2 = B ^* C
Donc \overrightarrow{\omega_1 \omega_2} = \dfrac{1}{2}\overrightarrow{AC} (d’après le théorème des milieux).
c) On a : I = M_1 ~^* M_2, donc \overrightarrow{IM_2} = \dfrac{1}{2} \overrightarrow{M_1M_2}.
Or \overrightarrow{M_1M_2} = \overrightarrow{AC} (d’après 1°/c) d’où \overrightarrow{M_2I} = \dfrac{-1}{2}\overrightarrow{AC} = \overrightarrow{\omega_2\omega_1}.
Donc I est l’image de M_2 par la translation de vecteur \overrightarrow{\omega_2\omega_1}.
D’autre part, M_2 décrit le cercle \Gamma_2 de diamètre [BC] or \omega_2 = B ^* C donc \omega_2 est le centre de \Gamma_2.
Et comme t_{\overrightarrow{\omega_2 \omega_1}} (\omega_2) = \omega_1 alors I décrit le cercle de centre \omega_1 et de rayon \Gamma_2.
\Gamma et \Gamma_2 ont le même rayon donc I décrit le cercle de diamètre [AB]
Conclusion : I décrit le cercle \Gamma de diamètre [AB].
Donc I est un point du cercle \Gamma_1.
Exercice 4
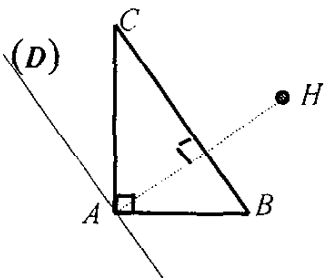
1) S_{(AB)} transforme le triangle AKB en AIB or AKB est un triangle rectangle en K et S_{(AB)}(K)=I alors AIB est un triangle rectangle en I ; d’où (AI) \perp (BI).
On a : S_{(AC)} : A↦A \\ K↦J \\ C↦C
AKC est rectangle en K et que S_{(AC)} conserve l’orthogonalité, alors le triangle AJC est rectangle en J ; d’où (CJ) \perp (AJ).
2) S_2\circ S_1 est la composée de deux symétries orthogonales d’axes sécants en A d’où S_2 \circ S_1 est une rotation de centre A
Soit \alpha une mesure de son angle.
On a \alpha \equiv 2 \widehat{(\overrightarrow{AB}, \overrightarrow{AC})} [2\pi] \equiv \pi [2\pi]
donc S_2\circ S_1 est une symétrie centrale de centre A.
De plus, S_2\circ S_1(I)=S_2 [S_1(I)]=S_2(K)=J or S_2\circ S_1=S_A et par suite A=I^∗J
3) On a : \tan\theta=\dfrac{AB}{AC}=\dfrac12 et \tan\theta=\dfrac{AK}{CK} d’où 2AK=CK.
D’autre part : IJ=2AI car A=I ^*J
IJ = 2AK (car la symétrie d’axe S_{(AB)} conserve les distances).
D’où IJ=CK. Or CK=CJ (la symétrie d’axe (AC) conserve les distances), d’où IJ=CJ.
Exercice 5
1) \begin{cases} MA = MC\\ ~~ \\ \left(\widehat{\overrightarrow{MA},\overrightarrow{MC}}\right)\equiv \dfrac{\pi}{2}(2\pi) \end{cases} \Leftrightarrow M\in D\cap \ell où Dest la médiatrice de [AC] et \ell l’arc du cercle de diamètre [AC] ne contenant pas B, privé de A et C. D’où la construction.
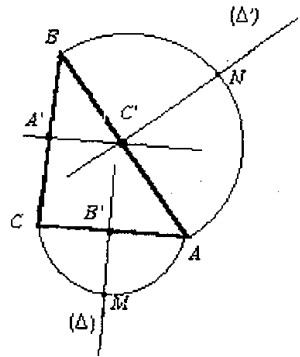
\begin{cases} NA = NB \\ ~~ \\ \left(\widehat{\overrightarrow{NB},\overrightarrow{NA}} \right) \not\equiv \dfrac{\pi}{2} (2\pi) \end{cases} \Longleftrightarrow M\in D’\cap \ell ‘ où D’=\mathrm{med}[AB] et \ell′ est l’arc du cercle de diamètre [AB] ne contenant pas C, privé de A et B. D’où la construction.
2.a) On a : A’=B^∗C et C’=A^∗B donc, d’après Thalès, A’C’=\dfrac{AC}{2}
or, comme M est un point du cercle de diamètre [AC]; \dfrac{AC}{2}=B’M
d’où A’C’=B’M.
De même, A’=C^∗B et B’=C^∗A, donc A’B’=\dfrac{AB}{2} et \dfrac{AB}{2}=C’N d’où A’B’=C’N.
b) On a A’C’=B’M. Il existe donc un unique déplacement qui envoie M sur A’ et B’ sur C’ ; comme \left( \widehat{\overrightarrow{A’C’},\overrightarrow{B’M}} \right)\equiv 0 (\pi), ce déplacement est une rotation r. Son angle r est \theta : \theta \equiv \left( \widehat{\overrightarrow{B’M},\overrightarrow{C’A’}} \right)(2\pi).
Or, par le théorème des milieux, \overrightarrow{C’A’} = \overrightarrow{AB’},
d’où \theta \equiv \left(\widehat{ \overrightarrow{B’M},\overrightarrow{AB’}} \right)(2\pi) \\ \theta \equiv -\dfrac{\pi}{2} (2\pi).
Conclusion : r est une rotation d’angle -\dfrac{\pi}{2}
3.a) On a A’B’=C’N et \left( \widehat{\overrightarrow{A’B’},\overrightarrow{C’N}} \right)\not\equiv 0 (\pi) donc il existe une unique rotation r’ telle que : r'(A’)=N et r'(B’)=C’.
Son angle \theta’ vérifie
\theta’ \equiv \left( \widehat{\overrightarrow{A’B’},\overrightarrow{NC’}} \right) (2\pi).
Or, par le théorème des milieux, \overrightarrow{A’B’} = \overrightarrow{CA},
donc \theta’ \equiv \left( \widehat{\overrightarrow{C’A},\overrightarrow{NC’}} \right) (2\pi)\equiv -\dfrac{\pi}{2} (2\pi).
Ainsi r’est une rotation d’angle -\dfrac{\pi}{2} et, comme r'(B’)=C’, on a r’=r. Donc r(A’)=N.
b) r est une rotation d’angle -\dfrac{\pi}{2}. Alors r\circ r est une rotation d’angle \pi \Rightarrow r \circ r est une symétrie centrale S_I. Cherchons son centre I.
On a : r\circ r(M)=r(A’)=N \Rightarrow S_I(M)=N \Leftrightarrow I=M^* N.
Conclusion : r\circ r = S_I où I=M^* N.
Soit \Omega le centre de r. On a
r(\Omega,-\dfrac{\pi}{2})\circ r(\Omega,-\dfrac{\pi}{2})=r(\Omega,\pi)=S_I, d’où \Omega=I. Donc le centre de r est I=M^* N.
c) On a r(A’)=N et r(M)=A’. Alors \begin{cases}A’M=A’N \\ ~~ \\ \left( \widehat{ \overrightarrow{A’M},\overrightarrow{A’N}} \right)\equiv -\dfrac{\pi}{2} (2\pi) \end{cases} donc le triangle MA’N est isocèle rectangle en A’.
Exercice 6
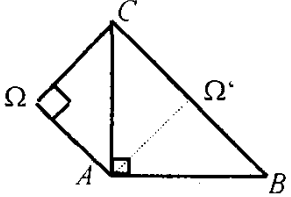
1) r\circ t est la composée d’une rotation et d’une translation, donc c’est une rotation d’angle \dfrac{\pi}{2} (même angle que r). Déterminons son centre \Omega.
On a r\circ t(A)=r(B)=C.
Il s’ensuit que \Omega A=\Omega C et (\widehat{\overrightarrow{\Omega A},\overrightarrow{\Omega C}})\equiv\dfrac{\pi}{2}(2\pi); d’où \Omega AC est un triangle isocèle rectangle en \Omega et de sens direct.
* De même, t\circ r est une rotation d’angle \dfrac{\pi}{2} et de centre \Omega’.
On a t\circ r(A)=t(A)=B et par suite \Omega’ AB est un triangle isocèle rectangle en \Omega’ et de sens direct (\Omega’=B^*C).
2) Posons M_1=r\circ t(M)~;~ M_2=t\circ r(M).
Soit f=r\circ t~~;~~ g=t\circ r.
Alors M_1=f(M) et M_2=g(M) \Longrightarrow M_2=(g\circ f^{-1})(M_1) car f^{-1}(M_1)=M
Or g\circ f^{-1}=R \left(\Omega’,\dfrac{\pi}{2}\right)\circ R \left(\Omega,-\dfrac{\pi}{2}\right)=T_{\overrightarrow{u}}
c’est une translation (les angles se compensent : \dfrac{\pi}{2}+(-\dfrac{\pi}{2})\equiv0(2\pi)).
Or T_{\overrightarrow{u}} (C) = g \circ f^{-1} (C) = g(A) = B d’où \overrightarrow{u} = \overrightarrow{CB}
M_2 = g \circ f^{-1} (M_1) \Rightarrow M_2 = T_{\overrightarrow{u}} (M_1) donc \overrightarrow{M_1M_2}=\overrightarrow{CB}. d’où BCM_1M_2 est un parallélogramme.
Exercice 7
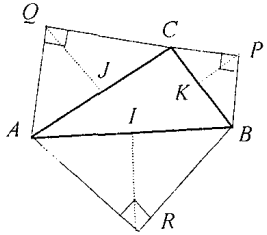
1.a) r_P \circ r_Q = R \left(P,\dfrac{\pi}{2}\right)\circ R \left(Q,\dfrac{\pi}{2}\right)
on a : \dfrac{\pi}{2}+\dfrac{\pi}{2}\equiv\pi\ (2\pi) d’où r_P\circ r_Q est une symétrie centrale de centre \omega.
De plus, r_P\circ r_Q(A)=r_P(C)=B d’où S_{\omega}(A)=B et par suite \omega=A^*B=I.
Conclusion : r_P\circ r_Q=S_I.
b) r_P\circ r_Q(Q)=S_I(Q).
r_P(Q) = S_1(Q) Posons Q’=S_I(Q).
Alors r_P(Q)=Q’ et \begin{cases} PQ=PQ’ \\ \text{et} \\ \widehat{(\overrightarrow{PQ};\overrightarrow{PQ’})} \equiv \dfrac{\pi}{2}\ (2\pi) \end{cases}
d’où PQQ’ est un triangle isocèle rectangle en P.
Or I=Q^*Q’ donc IPQ est un triangle isocèle en I.
2.a) r_Q\circ r_R = R \left(Q,\dfrac{\pi}{2}\right)\circ R\left(R,\dfrac{\pi}{2}\right). On a \dfrac{\pi}{2} + \dfrac{\pi}{2} \equiv \pi(2\pi) d’où r_Q \circ r_R est une symétrie centrale de centre \omega’.
Or r_Q\circ r_R(B)=r_Q(A)=C \Rightarrow S_{\omega’}(B)=C \Rightarrow \omega’=B^*C.
Conclusion : r_Q\circ r_R=S_K.
r_R\circ r_P = R \left(R,\dfrac{\pi}{2}\right) \circ R \left(P,\dfrac{\pi}{2}\right). On a \dfrac{\pi}{2} + \dfrac{\pi}{2} \equiv \pi(2\pi)
D’où r_R \circ r_P est une symétrie centrale de centre \omega”. Or r_R\circ r_P(C)=r_R(B)=A \Rightarrow \omega”=C^*A
Conclusion : r_R\circ r_P=S_J.
b) On a : r_Q\circ r_R=S_K d’où KQR est un triangle isocèle rectangle en K (même raisonnement que dans 1.b).
Et r_R\circ r_P=S_J \Rightarrow JPR est un triangle isocèle rectangle en J.
3) On a : R \left(I,\dfrac{\pi}{2}\right)(P)=Q ~~;~ R\left(I,\dfrac{\pi}{2}\right)(A)=R
donc (AP) \perp (QR).
On a aussi : R\left(J,\dfrac{\pi}{2}\right)(R)=P~~;~ R\left(J,\dfrac{\pi}{2}\right)(C)=Q
donc (RC) \perp (PQ).
Et : R\left(K,\dfrac{\pi}{2}\right)(Q)=R ~~;~ R\left(K,\dfrac{\pi}{2}\right)(B)=P donc (QB) \perp (RP).
Ainsi, (AP), (RC) et (QB) sont les hauteurs du triangle PQR.
(AP), (RC) et (QB) sont donc concourantes ; leur point d’intersection est l’orthocentre du triangle PQR.
Exercice 8
1.a)
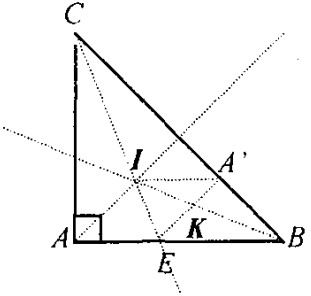
R_C(A)=A’ \Leftrightarrow \begin{cases} CA=CA’ \\ \text{et} \\ \left( \widehat{\overrightarrow{CA},\overrightarrow{CA’}} \right)\equiv\dfrac{\pi}{4}\ (2\pi)\end{cases}
D’où la construction du point A’ : A’=\ell(C,CA)\cap[CB).
b) R_C\circ R_A=S_{(CI)}\circ S_{(CA)}\circ S_{(CA)}\circ S_{(AI)}
car (CI)\cap(CA)=\{C\}~~;~~\ (CA)\cap(AI)=\{A\}
On a : 2(\widehat{ \overrightarrow{CA},\overrightarrow{CI}}) \equiv \dfrac{\pi}{4}\ (2\pi) ;~~ 2(\widehat{ \overrightarrow{AI}, \overrightarrow{AC}})\equiv\dfrac{\pi}{2}\ (2\pi)
Donc R_C\circ R_A=S_{(CI)}\circ S_{(AI)}=R(I,\dfrac{3\pi}{4}).
c) On a : R_C\circ R_A(I)=I ;\quad R_C\circ R_A(A)=A’. Donc IA=IA’.
Alors (\widehat{\overrightarrow{IA’} , \overrightarrow{AB} } ) \equiv (\widehat{\overrightarrow{IA’} , \overrightarrow{IA}}) +(\widehat{ \overrightarrow{IA} , \overrightarrow{AB}}) (\pi).
Or (\widehat{\overrightarrow{IA} , \overrightarrow{IA’} } ) \equiv\dfrac{3\pi}{4} (2\pi), car R(I,\dfrac{3\pi}{4})(A)= I’.
Ainsi (\widehat{\overrightarrow{IA} , \overrightarrow{AB} } ) \equiv (\widehat{\overrightarrow{AI} , \overrightarrow{AB} } ) + \pi(2\pi) \equiv -\dfrac{\pi}{4}+\pi (2\pi) \equiv\dfrac{3\pi}{4} (2\pi).
D’où (\widehat{\overrightarrow{IA’} , \overrightarrow{AB} } ) \equiv 0 (\pi).
Conclusion : (IA’) // (AB).
2.a) On a : (IA’) // (EB) et (A’B)\cap(EI)=\{C\}.
Il existe donc une unique homothétie h de centre C transformant E en I et B en A’. Son rapport est : k=\dfrac{IA’}{EB}=\dfrac{CA’}{CB}=\dfrac{CA}{CB}=\dfrac{1}{\sqrt{2}}.
Donc h = h \left(C,\dfrac{1}{\sqrt{2}}\right)=h_C et que h_C(B)=A’ et h_C(E)=I. D’où \overrightarrow{A’I}=\dfrac{1}{\sqrt{2}}\overrightarrow{BE}.
Conclusion : \overrightarrow{BE}=-\sqrt{2} \overrightarrow{IA’}.
b) h_K\circ h_C(B)=h_K(A’)=E
car \dfrac{KE}{KA’}=\dfrac{KB}{KI}=\dfrac{EB}{A’I}=-\sqrt{2} (théorème de Thalès).
3) h_K\circ h_C est la composée de deux homothéties dont le produit des rapports vaut -1. Donc h_K\circ h_C est une symétrie centrale. Et comme h_K \circ h_C(B)=E, alors h_K \circ h_C est une symétrie centrale de centre B ^* E = M
On a : h_K\circ h_C=S_M \Rightarrow h_K\circ h_C(C)=S_M(C).
\Rightarrow h_K (C) = S_M(C) Soit C’=S_M(C).
\overrightarrow{KC’}=-\sqrt{2} \overrightarrow{KC} \Rightarrow K \in (CC’).
Or (CC’)=(MC), donc K\in(MC).
Conclusion : K,M et C sont alignés.
Exercice 9
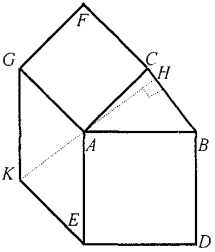
1.a) Comme AB=GK, il existe un unique déplacement f tel que f(A)=G; f(B)=K
et \widehat{( \overrightarrow{AB},\overrightarrow{GK})}\equiv\widehat{(\overrightarrow{AB},\overrightarrow{AE})} (2\pi) \equiv -\dfrac{\pi}{2} (2\pi).
f est un déplacement d’angle -\dfrac{\pi}{2}. Donc f est une rotation d’angle -\dfrac{\pi}{2}.
AC = GA alors il existe un unique déplacement f_1 tel que f_1(A)=G et f_1(C)=A \\ \widehat{(\overrightarrow{AC},\overrightarrow{GA})}\equiv-\dfrac{\pi}{2} (2\pi).
Donc f_1 est une rotation d’angle -\dfrac{\pi}{2}.
f et f_1 sont deux rotations de même angle et vérifiant :
Comme f(A)=f_1(A)=G d’où f=f_1.
Conclusion : il existe un unique déplacement f qui transforme A en G, B en K, et C en A.
f est la rotation d’angle -\dfrac{\pi}{2} et de centre \Omega
\begin{cases} \Omega A = \Omega G \\ \Omega C = \Omega A \end{cases} \Rightarrow \Omega est le centre du carré ACFG, donc f = R\left(\Omega,-\dfrac{\pi}{2}\right).
b) On a B\xrightarrow{f}K et C\xrightarrow{f}A donc (AK)\perp(BC).
Or (AH) \perp(BC), d’où (AH) et (AK) sont parallèles et les points A,H,K sont alignés.
On a f(A) = G ; M=B^*C
f(M) = f(B)^* f(C) = K^*A = P
(AM) \perp (GP)
Or P=K^*A=E^*G car AGKE est un parallélogramme.
Dd’où (GP)=(EG).
Conclusion : (AM) \perp(EG).
2.a) f(B)=K \\ f(F)=C car \widehat{(\overrightarrow{\Omega F},\overrightarrow{\Omega C})}\equiv -\dfrac{\pi}{2} (2\pi)). Et \Omega F = \Omega C
Donc BF=CK.
b) \widehat{(\overrightarrow{FB},\overrightarrow{CK})} \equiv -\dfrac{\pi}{2} (2\pi) (car f est une rotation d’angle -\dfrac{\pi}{2}).
3.a) On a EA=AB car AEDB est un carré. D’où il existe un unique déplacement g tel que g(A)=E et g(B)=A.
Or \widehat{(\overrightarrow{AB},\overrightarrow{EA})} \equiv \widehat{(\overrightarrow{ED},\overrightarrow{EA})} (2\pi) \equiv \dfrac{\pi}{2} (2\pi) ; ainsi g est une rotation d’angle \dfrac{\pi}{2}.
De plus, EK=AC alors, il existe donc un unique déplacement g_1 tel que g_1(A)=E et g_1(C)=K \\ \widehat{(\overrightarrow{AC},\overrightarrow{EK})} \equiv \widehat{(\overrightarrow{AC},\overrightarrow{AG})} (2\pi) \equiv \dfrac{\pi}{2} (2\pi).
Les rotations g et g_1 ont le même angle \dfrac{\pi}{2} et g(A)=g_1(A), donc g=g_1.
Conclusion : il existe un unique déplacement g transformant ABC en EAK. g est un déplacement d’angle \dfrac{\pi}{2} donc g=R(\Omega ‘ , \dfrac{\pi}{2})
\Omega’A=\Omega’E et \Omega’B=\Omega’A, d’où \Omega’ est le centre du carré AEDB
b) \begin{cases} \Omega’D=\Omega’B \\ ~~ \\ \widehat{(\overrightarrow{\Omega’D},\overrightarrow{\Omega’B})} \equiv \dfrac{\pi}{2} (2\pi) \end{cases} d’où g(D)=B or g(C)=K.
\begin{cases} g(D) = B \\ g(C) = K \end{cases} \Rightarrow DC = BK et \widehat{(\overrightarrow{DC},\overrightarrow{BK})} \equiv \dfrac{\pi}{2} (2\pi)
4°) (AK) \perp(BC) : (AK) est la hauteur issue de K du triangle KBC.
(FB) \perp(CK) : (FB) est la hauteur issue de B du triangle KBC.
(DC) \perp(BK) : (DC) c’est la hauteur issue de C du triangle KBC.
Conclusion : (AK), (BF) et (CD) sont les hauteurs du triangle KBC ; elles sont concourantes en I, l’orthocentre de KBC.
Exercice 10
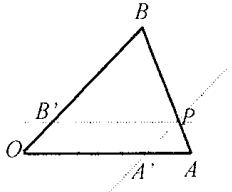
1) Comme OA=OB, il existe un unique déplacement r tel que r(O)=B et r(A)=O.
Comme \widehat{(\overrightarrow{OA},\overrightarrow{BO})}\not\equiv 0 (2\pi), donc r est une rotation d’angle \widehat{(\overrightarrow{OA},\overrightarrow{BO})}.
2) On a : (OA) // (B’P) et (OB’) // (A’P) ; donc (OA’PB’) est un parallélogramme.
De plus, OA’=B’P et B’P=B’B car B’PB est isocèle en B’) ; d’où OA’=BB’.
Il existe alors une unique rotation r_1 telle que r_1(O)=B et r_1(A’)=B’
avec \widehat{(\overrightarrow{OA},\overrightarrow{BB’})} \equiv \widehat{(\overrightarrow{OA},\overrightarrow{BO})} (2\pi).
Les rotations r et r_1 ont même angle et vérifient r_1(O)=r(O) ; donc r=r_1 et par suite r(A’)=B’.
Soit \Omega le centre de r.
On a r(O)=B \Rightarrow \Omega O=\Omega B, \\ r(A)=O \Rightarrow \Omega A=\Omega O.
Donc \Omega O=\Omega B=\Omega A : \Omega est le centre du cercle circonscrit au triangle OAB.
3) Comme r(A’)=B’, on a \widehat{(\overrightarrow{\Omega A’},\overrightarrow{\Omega B’})} \equiv \widehat{(\overrightarrow{OA},\overrightarrow{BO})}(2\pi).
Or \widehat{(\overrightarrow{OA},\overrightarrow{BO})} \equiv \widehat{(\overrightarrow{OA’},\overrightarrow{B’O})} (2\pi) \equiv \widehat{(\overrightarrow{OA’},\overrightarrow{OB’})}+\pi (2\pi).
Ainsi \widehat{(\overrightarrow{\Omega A’},\overrightarrow{\Omega B’})} \equiv \widehat{(\overrightarrow{OA’},\overrightarrow{OB’})}+\pi (2\pi) \equiv \widehat{(\overrightarrow{OA’},\overrightarrow{OB’})}(\pi).
Comme, de plus, \widehat{(\overrightarrow{\Omega A’},\overrightarrow{\Omega B’})}\not\equiv 0(\pi), on en déduit que les quatre points O,\ A’,\ B’,\ \Omega sont concycliques.
Exercice 11
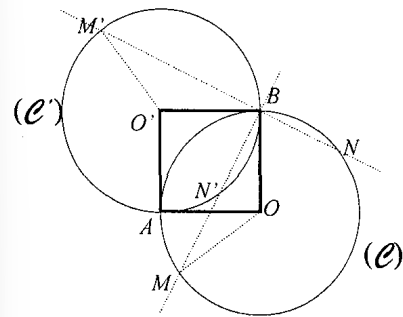
1) On a OM=O’M’. Donc il existe un unique déplacement r tel que r(O)=O’ et r(M)=M’. Comme \widehat{(\overrightarrow{OM},\overrightarrow{O’M’})}\equiv-\dfrac{\pi}{2} (2\pi), donc r est une rotation d’angle -\dfrac{\pi}{2}.
Soit \Omega le centre de r. Alors r(O)=O’ \Leftrightarrow \begin{cases} \Omega O=\Omega O’ \\ \widehat{(\overrightarrow{\Omega O},\overrightarrow{\Omega O’})}\equiv-\dfrac{\pi}{2} (2\pi) \end{cases}.
Donc le triangle QOO’ est un triangle rectangle isocèle en \Omega, et de sens indirect.
Le seul triangle isocèle rectangle et de sens indirect ayant [OO’] comme côté est BOO’, d’où \Omega=B.
Conclusion : Il existe une seule rotation :
r=R\left(B,-\dfrac{\pi}{2}\right) qui transforme O\mapsto O’ et M\mapsto M’.
2) \widehat{(\overrightarrow{BN},\overrightarrow{BN’})} \equiv \widehat{(\overrightarrow{M’B},\overrightarrow{BM})} (2\pi) \equiv -\widehat{(\overrightarrow{BM},\overrightarrow{M’B})} (2\pi)
\equiv -[ \widehat{(\overrightarrow{BM},\overrightarrow{BM’})} + \widehat{(\overrightarrow{BM’},\overrightarrow{M’B})} ] (2\pi)
\equiv – ( – \dfrac{\pi}{2} + \pi ) (2\pi) \equiv -\dfrac{\pi}{2}(2\pi).
Ainsi BMN’ est un triangle rectangle en B, inscrit dans le cercle \mathscr{C}’.
Donc [M’N’] est un diamètre, et M’*N’=O’.
De même, BMN est un triangle rectangle en B, inscrit dans le cercle \mathscr{C}, donc [MN] est un diamètre et M*N=O.
Ainsi : M^*N=O \Rightarrow r(M)^*r(N)=r(O) \Rightarrow M’^*r(N)=O’
Or M’^*N’ = O’ \Rightarrow r(N)=N’.
Exercice 12
1.a)
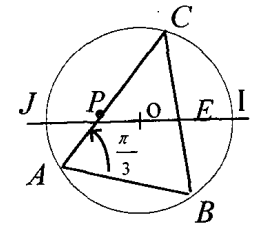
b) On a : \widehat{(\overrightarrow{AB},\overrightarrow{AC})} \equiv \dfrac{\pi}{3} (2\pi).
Donc \widehat{(\overrightarrow{MB},\overrightarrow{MC})} \equiv \dfrac{\pi}{3} (2\pi) \Leftrightarrow \widehat{(\overrightarrow{MB},\overrightarrow{MC})}\equiv\widehat{(\overrightarrow{AB},\overrightarrow{AC})}(2\pi).
Ainsi, l’ensemble E_1 des points M tels que \widehat{(\overrightarrow{MB},\overrightarrow{MC})} \equiv \dfrac{\pi}{3}(2\pi) est l’arc [BC] contenant A, du cercle \mathscr{C}, privé de B et C.
c) On définit aussi E_2, l’ensemble des points M tels que \widehat{(\overrightarrow{MB},\overrightarrow{MC})}=\dfrac{\pi}{3}(2\pi) et MB<MC.
Alors E_2 est l’arc [BJ] contenant A, privé de B et J.
Car E_2 = E_1 \cap P_1 où P_1 est le demi-plan de frontière (IJ) contenant B.
2.a) On a AB=PC, donc il existe un déplacement unique qui transforme A en P et B en C.
Or \widehat{(\overrightarrow{AB},\overrightarrow{PC})}\equiv\widehat{(\overrightarrow{AB},\overrightarrow{AC})} (2\pi) \equiv\dfrac{\pi}{3}(2\pi).
Donc ce déplacement est la rotation R d’angle \dfrac{\pi}{3} telle que R(A)=P et R(B)=C.
b) Soit \Omega le centre de R.
On a R(B)=C\Rightarrow \widehat{(\overrightarrow{\Omega B},\overrightarrow{\Omega C})} \equiv \dfrac{\pi}{3}(2\pi).
Or \widehat{(\overrightarrow{AB},\overrightarrow{AC})} \equiv \dfrac{\pi}{3} (2\pi) \Rightarrow \widehat{(\overrightarrow{\Omega B},\overrightarrow{\Omega C})} \equiv \widehat{(\overrightarrow{AB},\overrightarrow{AC})} (2\pi) , donc \Omega\in E_1 et \Omega\in \mathscr{C}.
D’autre part, \Omega\in \text{med}[CB]. Mais \text{med}[CB]=(OE). Donc \Omega\in \mathscr{C}\cap (OE).
D’où \Omega = J ou r=I or \Omega est un point de l’arc [BC] de \mathscr{C} contenant A. Ainsi \Omega=J.
Conclusion : R est une rotation de centre J et d’angle \dfrac{\pi}{3}.
c) On a : R(A)=P \Leftrightarrow \begin{cases} JA=JP \\ \widehat{(\overrightarrow{JA},\overrightarrow{JP})} \equiv\dfrac{\pi}{3} (2\pi) \end{cases}.
Donc le triangle JAP est équilatéral de sens direct.
3) On a JB=JC.
Ainsi J est un point de l’ensemble des points M vérifiant : \widehat{(\overrightarrow{MB},\overrightarrow{MC})} \equiv \dfrac{\pi}{3} (2\pi). Donc \widehat{(\overrightarrow{JB},\overrightarrow{JC})} \equiv \dfrac{\pi}{3}(2\pi) et JB=JC d’où R(B)=C.
D’où R \circ S_B (B) = C
1ʳᵉ Méthode :
R\circ S_B=R \left(J,\dfrac{\pi}{3}\right)\circ R(B,\pi).
Donc R\circ S_B est une rotation d’angle \theta \equiv \dfrac{\pi}{3}+\pi (2\pi) \equiv -\dfrac{2\pi}{3} (2\pi).
Or \widehat{(\overrightarrow{IC},\overrightarrow{IB})}\equiv \pi – \widehat{(\overrightarrow{JB},\overrightarrow{JC})}(2\pi)
D’où \widehat{(\overrightarrow{IC},\overrightarrow{IB})}\equiv \dfrac{2\pi}{3}(2\pi).
\begin{cases} IC=IB \\ \text{et} \\ \widehat{(\overrightarrow{IC},\overrightarrow{IB})}\equiv -\dfrac{2\pi}{3}(2\pi) \end{cases} d’où R(I,-\dfrac{2\pi}{3})(B)=C
Ainsi R(I,-\dfrac{2\pi}{3}) et R \circ S_B sont deux rorations de même angle transformant de la même façon B en C.
Donc R\circ S_B=R(I,-\dfrac{2\pi}{3}).
2ᵉ Méthode :
On décompose une rotation en produit de deux symétries orthogonales :
R\circ S_B=R\left(J,\dfrac{\pi}{3}\right)\circ R(B,\pi) =S_\Delta\circ S_{(BJ)}\circ S_{\Delta’},
où \Delta ‘ est la droite passant par B telle que \widehat{(\overrightarrow{BJ},\overrightarrow{\Delta ‘})} \equiv \dfrac{\pi}{2} (2\pi) \Rightarrow \Delta ‘ \perp (BJ) et passant par J.
D’où \Delta’ = ( BI) donc R \circ S_B = S_\Delta \circ S_{(BI)}
D’autre part R \circ S_B(B) = C \Rightarrow S_\Delta (B) = C \Rightarrow D = med (BD] = (IJ)
\Rightarrow R \circ S_B = S_{(JI)} \circ S_{(BI)} = R(I, 2\widehat{(\overrightarrow{IB},\overrightarrow{IJ})}) =R\left(I,-\dfrac{2\pi}{3}\right).
Exercice 13
1) f est la composée d’un nombre impair d’antidéplacements. Donc f est un antidéplacement.
2) Il suffit de montrer que f n’a pas de point invariant.
Soit \text{Inv}f l’ensemble des points invariants par f.
Si \text{Inv}f \neq \varnothing, alors f=S_\Delta.
Or S_{(BC)}\circ S_{(CA)}\circ S_{(AB)}=S_\Delta. Soit H=S_{(BC)}(A).
On a : S_{(BC)}\circ S_{(CA)}\circ S_{(AB)}(A)=S_\Delta(A) et comme S_\Delta(A)=H, cela signifie que \Delta est sur la médiatrice de [AH]. D’où \Delta=(BC).
Ainsi : S_{(BC)}\circ S_{(CA)}\circ S_{(AB)}=S_{(BC)},
donc S_{(CA)}\circ S_{(AB)}=\text{id}p
ou encore S_{(CA)}\circ S_{(AB)}=R(A,2\widehat{(\overrightarrow{AB},\overrightarrow{AC})})=S_A
Conclusion : \text{Inv}f=\varnothing. Donc f est une symétrie glissante.
On a : f=S_{(BC)}\circ S_{(CA)}\circ S_{(AB)}=S_{(BC)}\circ R(A,\pi) \\ f = S_{(BC)}\circ S_{D}\circ S_{(AH)} . Où D est la droite passant par A et perpendiculaire à (AH).
Donc :
f=T_{\overrightarrow{AH}}\circ S_{(AH)}.
Exercice 14
1) On a : f(A)=D et f(D)=C.
f étant un antidéplacement, il est soit une symétrie orthogonale, soit une symétrie glissante.
Supposons que f soit une symétrie orthogonale : f=S_\Delta.
On a alors S_\Delta(A)=D donc S_\Delta(D)=A, or S_\Delta(D)=C ce qui donne une contradiction.
Donc f\neq S_\Delta et par suite, f est une symétrie glissante.
2) A \xrightarrow{f} D \\ D \xrightarrow{f} C \\ C \xrightarrow{f} E.
a) Le triangle ADC est isocèle rectangle en D, donc DA=DC et
\widehat{( \overrightarrow{DA},\overrightarrow{DC})}\equiv -\dfrac{\pi}{2}\ [2\pi].
Comme un antidéplacement change le signe des mesures d’angle :
\widehat{(\overrightarrow{CD},\overrightarrow{CE})}\equiv \dfrac{\pi}{2}\ [2\pi].
Ainsi, DEC est isocèle rectangle en E.
b) On a CD=CE et CD=CB, donc CE=CB.
De plus, (CD) \perp(CB) et (CB) \perp(CE), d’où (CB) // (CE).
Donc C=E^*B (milieu-translaté) : c’est la construction de E.
c) A \xrightarrow{f} D \\ D \xrightarrow{f} C \\ B \xrightarrow{f} B’.
Comme ABD est isocèle rectangle en A et de sens direct, son image DB’C par l’antidéplacement f est un triangle en D de sens indirect.
D’où la construction du point B’ (voir figure).
3) Écriture “glissante” de f.
Il existe un vecteur directeur \vec u de \Delta tel que
f=S_\Delta\circ T_{\vec u}=T_{-\vec u}\circ S_\Delta.
On a f\circ f=T_{2\vec u}, mais aussi f\circ f(A)=f(f(A))=f(D)=C.
Donc T_{2\vec u}(A)=C et pa la suite 2\vec u=\overrightarrow{AC}\ \Rightarrow\ \vec u=\dfrac12\overrightarrow{AC}=\overrightarrow{AO}.
Enfin, S_\Delta\circ T_{\vec u}=f Donc S_\Delta \circ T_{\vec u} (A) =f(A) \Rightarrow S_\Delta (O)=D.
Or T_{\vec u}(A)=O, donc S_\Delta(O)=D et \Delta est la médiatrice de [OD].
Conclusion : la forme réduite de f est
f=S_\Delta\circ T_{\overrightarrow{AO}}=T_{\overrightarrow{AO}}\circ S_\Delta, où \Delta est la médiatrice de [OD].
4) Posons \varphi_1=f\circ S_{(AD)}. C’est la composée de deux antidéplacements, donc \varphi_1 est un déplacement.
On a \varphi_1(D)= f \circ S_{AD} (D) = f\big(S_{(AD)}(D)\big)=f(D)=C.
Soit \theta_1 une mesure de son angle. Alors :
\theta_1\equiv \widehat{(\overrightarrow{AD},\overrightarrow{DC})}\ [2\pi] \equiv \widehat{(\overrightarrow{DA}, \overrightarrow{DC})}+\pi\ [2\pi] \equiv \dfrac{3\pi}{2}\ [2\pi] \equiv -\dfrac{\pi}{2}\ [2\pi].
Donc \varphi_1 est une rotation d’angle -\dfrac{\pi}{2}. Soit \Omega_1 son centre ; on a :
\begin{cases} \Omega_1A=\Omega_1D \\ \text{et} \\ \Omega_1D=\Omega_1C\end{cases} .
Ainsi \Omega_1 est l’intersection des médiatrices de [AD] et [DC], donc \Omega_1=O.
Conclusion :
\varphi_1 = R\left(O,-\dfrac{\pi}{2}\right).